Talks
- Revisiting Overestimation in Value-based Deep Reinforcement Learning | AMII AI Seminar (Slides) (Video)
- Trajectory-Ranked Reward Extrapolation | Internal talk at Preferred Networks (Slides)
- Deterministic Implementations for Reproducibility in Deep Reinforcement Learning | AAAI 2019 Workshop on Reproducibility in AI (Slides)
Projects
Deep Reinforcement Learning
My Master's thesis focused on reproducibility in deep reinforcement learning. Specifically, I studied the impact of nondeterminism in algorithm implementations on our ability to reproduce results.
Robotics
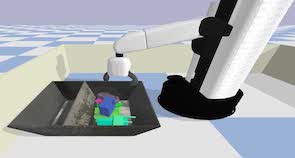
At Preferred Networks I have worked on targeted grasping for robotics. We combine techniques from goal-conditioned reinforcement learning (hindsight experience replay), deep reinforcement learning (QT-OPT), and distributed training to achieve target grasping on a human support robot.
Inverse Reinforcement Learning
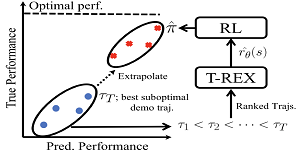
We leverage ranked demonstrations to improve upon a suboptimal demonstrator in high-dimensional deep reinforcement learning tasks.

